TÉCNICA Y CONSEJOS
1 - Agujas (tipos, cuidados, fuerza de apoyo y duración)
2 - Cápsulas (tipos y características)
3 - Brazos (tipos, ajuste del "Antiskating")
4 - Protractors (programa y su utilización)
5 - Motores (tipos)
6 - Sistemas de tracción (tipos y poleas)
7 - Platos (tipos y control de velocidad)
8 - Fonochasis (tipos)
ADVERTENCIA:
Aunque esta página es de diseño propio, algunos textos, dibujos y/o fotos son una recopilación de artículos hallados en Internet, por lo que si alguien cree que he infringido algún copyright ruego me lo haga saber a través de mi e-mail.
Podéis bajaros este pequeño tutorial pulsando en el siguiente botón. Muchas gracias.
Aunque esta página es de diseño propio, algunos textos, dibujos y/o fotos son una recopilación de artículos hallados en Internet, por lo que si alguien cree que he infringido algún copyright ruego me lo haga saber a través de mi e-mail.
Podéis bajaros este pequeño tutorial pulsando en el siguiente botón. Muchas gracias.
1. AGUJAS:
Es el único elemento en contacto con el surco del disco. Veamos unos cuantos detalles para su buena conservación.
1.1 - CUIDADOS Y LIMPIEZA:
A fin de mantener una óptima reproducción del sonido y minimizar el desgaste de los discos y de la aguja, se recomienda que se sigan los siguientes pasos antes de cada reproducción::
Eliminar, con mucho cuidado, el polvo acumulado en la superficie del disco utilizando un cepillo suave de fibra de carbono o un trapo que no raye ni deje pelusa (algodón, muselina...) antes de cada uso. No es recomendable el uso de disolventes de ningún tipo ni para la aguja ni para la superficie del disco. Si es necesario, los discos deberán limpiarse con agua desmineralizada templada con un poco de jabón neutro y que no contengan ningún tipo de perfume o aditivo.
Para la limpieza de la aguja se deberá pasar un par de veces, desde atrás hacia adelante, un cepillito muy suave (fibra de carbono, piel de marta o similares) a lo largo del "cantilever" (la barrita que une la aguja a la cápsula) cada vez que se cambie de cara del disco. La utilización de disolventes (alcohol...) en la aguja puede producir daños al adhesivo que sujeta a la aguja al cantilever. Estos disolventes también pueden producir daños en el interior de la cápsula.
1.2 - DURACIÓN MEDIA:
Con los debidos cuidados, una aguja de diamante y de buena calidad puede llegar a las 1000 horas sin degradación audible del sonido. Las agujas empiezan a mostrar fatiga traspasadas estas 1000 horas, pero pueden utilizarse hasta un tope máximo de 2000 horas de uso. (fuente: www.ortofon.com)
En el caso de utilizar agujas de zafiro (mucho más económicas), la duración de las mismas no se deberá exceder de las 100 horas de uso, ya que su desgaste es muchísimo mayor y se forman aristas vivas y residuos que llegan a dañar los discos.
1.3 - AJUSTE DE LA FUERZA DE APOYO Y DEL "ANTISKATING":
Se deberá ajustar la fuerza de apoyo según las recomendaciones del fabricante de la cápsula, así como el "antiskating" (anti-deslizamiento) según sea una aguja de punta cónica (esférica) o elíptica (birradial). Por regla general, si no se dispone de un disco de pruebas sin surcos, el número del dial del control del antiskating deberá coincidir con la fuerza de apoyo del brazo, al menos para las de punta esférica.
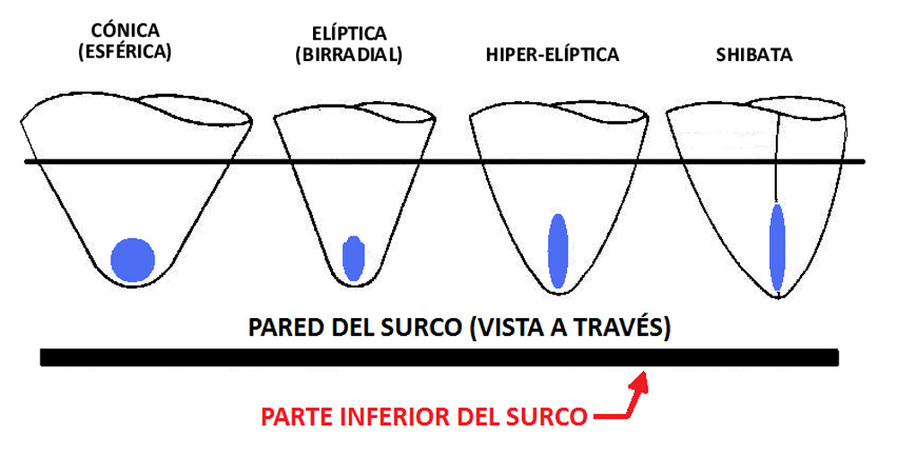
1.4 - TIPOS DE AGUJAS:
Hay de varios tipos. Entre todas ellas están las siguientes (por orden de peor a mejor):
· Cónicas (o esféricas)
· Elípticas (o birradiales)
· Hiperelípticas
· Piramidales
· Shibata
Es el único elemento en contacto con el surco del disco. Veamos unos cuantos detalles para su buena conservación.
1.1 - CUIDADOS Y LIMPIEZA:
A fin de mantener una óptima reproducción del sonido y minimizar el desgaste de los discos y de la aguja, se recomienda que se sigan los siguientes pasos antes de cada reproducción::
Eliminar, con mucho cuidado, el polvo acumulado en la superficie del disco utilizando un cepillo suave de fibra de carbono o un trapo que no raye ni deje pelusa (algodón, muselina...) antes de cada uso. No es recomendable el uso de disolventes de ningún tipo ni para la aguja ni para la superficie del disco. Si es necesario, los discos deberán limpiarse con agua desmineralizada templada con un poco de jabón neutro y que no contengan ningún tipo de perfume o aditivo.
Para la limpieza de la aguja se deberá pasar un par de veces, desde atrás hacia adelante, un cepillito muy suave (fibra de carbono, piel de marta o similares) a lo largo del "cantilever" (la barrita que une la aguja a la cápsula) cada vez que se cambie de cara del disco. La utilización de disolventes (alcohol...) en la aguja puede producir daños al adhesivo que sujeta a la aguja al cantilever. Estos disolventes también pueden producir daños en el interior de la cápsula.
1.2 - DURACIÓN MEDIA:
Con los debidos cuidados, una aguja de diamante y de buena calidad puede llegar a las 1000 horas sin degradación audible del sonido. Las agujas empiezan a mostrar fatiga traspasadas estas 1000 horas, pero pueden utilizarse hasta un tope máximo de 2000 horas de uso. (fuente: www.ortofon.com)
En el caso de utilizar agujas de zafiro (mucho más económicas), la duración de las mismas no se deberá exceder de las 100 horas de uso, ya que su desgaste es muchísimo mayor y se forman aristas vivas y residuos que llegan a dañar los discos.
1.3 - AJUSTE DE LA FUERZA DE APOYO Y DEL "ANTISKATING":
Se deberá ajustar la fuerza de apoyo según las recomendaciones del fabricante de la cápsula, así como el "antiskating" (anti-deslizamiento) según sea una aguja de punta cónica (esférica) o elíptica (birradial). Por regla general, si no se dispone de un disco de pruebas sin surcos, el número del dial del control del antiskating deberá coincidir con la fuerza de apoyo del brazo, al menos para las de punta esférica.
1.4 - TIPOS DE AGUJAS:
Hay de varios tipos. Entre todas ellas están las siguientes (por orden de peor a mejor):
· Cónicas (o esféricas)
· Elípticas (o birradiales)
· Hiperelípticas
· Piramidales
· Shibata
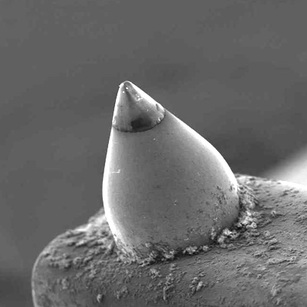
1.4.1 - CÓNICA:
Como su nombre indica, se trata de una punta con forma de cono, aunque redondeada en su vértice. Esta es la razón por la que también se la denomina “esférica”.
Es la forma menos adecuada para leer los surcos del disco, pero tiene la ventaja de que su tallado es fácil y, en consecuencia, resultan baratas de producir. Además, a pesar de que su forma no es la más adecuada, dan bastante buen resultado comparado con el coste de fabricación.
Por todo ello son bastante utilizadas en Alta Fidelidad de GAMA MEDIA.
1.4.2 - ELÍPTICA:
Son parecidas a un "cono aplastado”, cuya sección es una elipse.
El radio menor queda perpendicular al surco, mientras que el radio mayor queda en la trayectoria de éste.
El tallado es mucho más parecido al del estilete de grabación original, por lo que extrae la información del surco con más precisión que el diseño cónico-esférico. Por el contrario, son más caras porque el tallado es más difícil de realizar.
Se suelen utilizar en equipos de GAMA MEDIA-ALTA.
1.4.3 - HIPER-ELÍPTICA Y SHIBATA:
Tienen la misma forma que el estilete de grabación, pero con las aristas redondeadas, lo que las convierten en la ideales para sacar todo el partido posible a una grabación.
Su tallado es muy complicado, y por ello son mucho más caras, quedando reservadas para equipos de MUY ALTA GAMA.
Como su nombre indica, se trata de una punta con forma de cono, aunque redondeada en su vértice. Esta es la razón por la que también se la denomina “esférica”.
Es la forma menos adecuada para leer los surcos del disco, pero tiene la ventaja de que su tallado es fácil y, en consecuencia, resultan baratas de producir. Además, a pesar de que su forma no es la más adecuada, dan bastante buen resultado comparado con el coste de fabricación.
Por todo ello son bastante utilizadas en Alta Fidelidad de GAMA MEDIA.
1.4.2 - ELÍPTICA:
Son parecidas a un "cono aplastado”, cuya sección es una elipse.
El radio menor queda perpendicular al surco, mientras que el radio mayor queda en la trayectoria de éste.
El tallado es mucho más parecido al del estilete de grabación original, por lo que extrae la información del surco con más precisión que el diseño cónico-esférico. Por el contrario, son más caras porque el tallado es más difícil de realizar.
Se suelen utilizar en equipos de GAMA MEDIA-ALTA.
1.4.3 - HIPER-ELÍPTICA Y SHIBATA:
Tienen la misma forma que el estilete de grabación, pero con las aristas redondeadas, lo que las convierten en la ideales para sacar todo el partido posible a una grabación.
Su tallado es muy complicado, y por ello son mucho más caras, quedando reservadas para equipos de MUY ALTA GAMA.
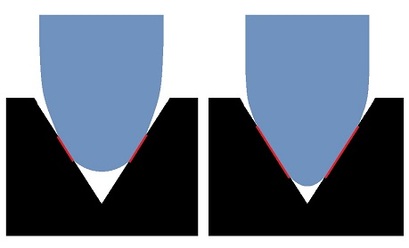
1.4.4 - COMPARACIÓNES:
Veamos la comparación entre los dos tipos más comunes de agujas: la ESFÉRICA (izquierda) y la ELÍPTICA (derecha).
Nótese la diferencia de las áreas de contacto con el surco, que están marcadas con líneas en rojo.
La elíptica permite una mayor área de contacto, lo que incrementa la fidelidad. En la esférica el contacto con el surco es menor, lo que genera una fidelidad inferior.
Para una información más detallada, pinchad el botón de abajo:
Veamos la comparación entre los dos tipos más comunes de agujas: la ESFÉRICA (izquierda) y la ELÍPTICA (derecha).
Nótese la diferencia de las áreas de contacto con el surco, que están marcadas con líneas en rojo.
La elíptica permite una mayor área de contacto, lo que incrementa la fidelidad. En la esférica el contacto con el surco es menor, lo que genera una fidelidad inferior.
Para una información más detallada, pinchad el botón de abajo:
2 - CÁPSULAS (FONOCAPTORES):
Hay de varios tipos, pero las más usuales son las siguientes:
· Cerámicas
· Electrostáticas
· Magnéticas
Hay de varios tipos, pero las más usuales son las siguientes:
· Cerámicas
· Electrostáticas
· Magnéticas

2.1. - CERÁMICAS:
También llamadas piezoeléctricas, o de cristal. Se basan en la propiedad que tienen algunos cristales de generar electricidad cuando son sometidos a deformaciones o presiones que alteran su estructura molecular.
Se componen de una lámina de un cristal que presente dicha característica, sujeto por una pieza de goma denominada "yugo", sobre la cual ejerce presión el cantilever de la aguja. De ésta forma, la vibración captada por la aguja es transmitida a través del cantilever a esta pieza de goma que, a su vez, la hace llegar al cristal.
Proporcionan una señal de salida bastante alta, que puede llegar a los 1,2 voltios de pico en los cristales compuestos por "Sal de Rocehelle", y de 0,5 voltios en el caso del "Titanato de Bario".
Son sencillas y baratas de construir, y NO necesitan de circuitos adicionales para funcionar correctamente.
La respuesta en frecuencias es bastante irregular, con especial dificultad para reproducir frecuencias de más de 8 KHz.
Son muy sensibles a la humedad y a los cambios de temperatura (a más de 40 grados quedan inservibles) y, sobre todo, poseen una elevada distorsión.
También llamadas piezoeléctricas, o de cristal. Se basan en la propiedad que tienen algunos cristales de generar electricidad cuando son sometidos a deformaciones o presiones que alteran su estructura molecular.
Se componen de una lámina de un cristal que presente dicha característica, sujeto por una pieza de goma denominada "yugo", sobre la cual ejerce presión el cantilever de la aguja. De ésta forma, la vibración captada por la aguja es transmitida a través del cantilever a esta pieza de goma que, a su vez, la hace llegar al cristal.
Proporcionan una señal de salida bastante alta, que puede llegar a los 1,2 voltios de pico en los cristales compuestos por "Sal de Rocehelle", y de 0,5 voltios en el caso del "Titanato de Bario".
Son sencillas y baratas de construir, y NO necesitan de circuitos adicionales para funcionar correctamente.
La respuesta en frecuencias es bastante irregular, con especial dificultad para reproducir frecuencias de más de 8 KHz.
Son muy sensibles a la humedad y a los cambios de temperatura (a más de 40 grados quedan inservibles) y, sobre todo, poseen una elevada distorsión.
2.2 - ELECTROSTÁTICAS (O DE CONDENSADOR):
Están basadas en el "Principio capacitivo".
Técnicamente es un condensador en el cual una de las placas la forma el cantilever de la aguja. Al moverse varía la capacidad del condensador, dando lugar a una modulación de una portadora constante, que es generada por un circuito adicional. Dicha modulación se realiza en frecuencia. Aparte de ello, necesitan de una alimentación externa constante.
Su desventaja es la complejidad de todo el sistema, que las hacen muy difícil de fabricar y, en consecuencia, son bastante caras.
Sin embargo, presentan un excelente nivel de salida y una respuesta completamente plana que puede cubrir, sin problemas,
desde los 15 hasta los 40 KHz.
Los micrófonos del tipo "Electret" son un buen ejemplo de ello.
2.3. - MAGNÉTICAS:
Están basados en el "Principio de imán-bobina".
Son las más utilizados en alta fidelidad,debido a su relativo coste de fabricación y, en consecuencia, al precio final con relación al rendimiento que presentan.
Dentro de los fonocaptores magnéticos, existen tres diseños distintos, aunque basados en el mismo principio:
· De imán movil
· De imán inducido
· De bobina movil
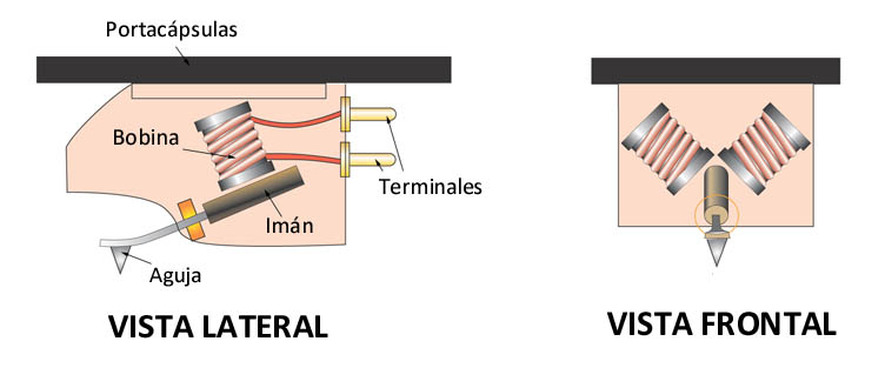
2.3.1 - MAGNÉTICAS DE IMAN MOVIL:
Dentro del cantilever de la aguja (que es hueco) se introduce un pequeño imán, que queda en el interior del cartucho, entre unas bobinas de cobre. El movimiento del imán, debido a la vibración dentro de las bobinas, genera una tensión eléctrica que es directamente proporcional a dicha vibración. Éste es el "Principio de Faraday" puro y duro.
La desventaja de éste diseño es que el peso del imán puede atenuar las vibraciones, perjudicando su funcionamiento.
El nivel de salida de éstas cápsulas es bastante escaso, necesitando de un preamplificador para poder elevarlo a nivel de línea.
Están basadas en el "Principio capacitivo".
Técnicamente es un condensador en el cual una de las placas la forma el cantilever de la aguja. Al moverse varía la capacidad del condensador, dando lugar a una modulación de una portadora constante, que es generada por un circuito adicional. Dicha modulación se realiza en frecuencia. Aparte de ello, necesitan de una alimentación externa constante.
Su desventaja es la complejidad de todo el sistema, que las hacen muy difícil de fabricar y, en consecuencia, son bastante caras.
Sin embargo, presentan un excelente nivel de salida y una respuesta completamente plana que puede cubrir, sin problemas,
desde los 15 hasta los 40 KHz.
Los micrófonos del tipo "Electret" son un buen ejemplo de ello.
2.3. - MAGNÉTICAS:
Están basados en el "Principio de imán-bobina".
Son las más utilizados en alta fidelidad,debido a su relativo coste de fabricación y, en consecuencia, al precio final con relación al rendimiento que presentan.
Dentro de los fonocaptores magnéticos, existen tres diseños distintos, aunque basados en el mismo principio:
· De imán movil
· De imán inducido
· De bobina movil
2.3.1 - MAGNÉTICAS DE IMAN MOVIL:
Dentro del cantilever de la aguja (que es hueco) se introduce un pequeño imán, que queda en el interior del cartucho, entre unas bobinas de cobre. El movimiento del imán, debido a la vibración dentro de las bobinas, genera una tensión eléctrica que es directamente proporcional a dicha vibración. Éste es el "Principio de Faraday" puro y duro.
La desventaja de éste diseño es que el peso del imán puede atenuar las vibraciones, perjudicando su funcionamiento.
El nivel de salida de éstas cápsulas es bastante escaso, necesitando de un preamplificador para poder elevarlo a nivel de línea.
2.3.2 - MAGNÉTICAS DE IMAN INDUCIDO:
Es una evolución del sistema de imán móvil.
Las bobinas van montadas sobre un núcleo metálico imantado, con un entrehierro. Al final del cantilever hay una pieza de metal que no necesariamente ha de ser de naturaleza magnética. De hecho, normalmente es de aluminio o una aleación de berilio.
Esta placa de metal está centrada en el entrehierro. Al vibrar, ésta se desplaza, cortando las líneas de fuerza del imán fijo que forma el núcleo de las bobinas. De éste modo se genera la señal. El sistema es idéntico al de una cabeza de magnetófono, donde la cinta es sustituida en éste caso por la pieza del cantilever.
Este sistema permite usar metales más ligeros y, en consecuencia, dan más movilidad al conjunto lector.
2.3.3 - MAGNÉTICAS DE BOBINA MOVIL:
En éste caso las bobinas van montadas directamente sobre el cantilever, y es el imán el que está fijo dentro del cartucho.
Se trata de otro sistema para disminuir el peso del conjunto aguja-cantilever, ya que se supone que el cobre de las bobinas pesará mucho menos que el metal (imantado o no) por pequeño que éste sea. Esto conlleva que las bobinas sean muy pequeñas y, en consecuencia, dan un nivel de salida inferior incluso al de los otros dos tipos, por lo que necesitan un "primer preamplificador que ataque al segundo preamplificador", o bien uno con más ganancia.
El gran inconveniente es que la aguja no es intercambiable, dado que las bobinas forman parte de ella.
Son más caras que las anteriores porque su construcción es más delicada y difícil. Sin embargo, la diferencia de sonido es notable con respecto a las otras, a condición de que el preamplificador esté bien diseñado y libre de ruidos que, a esos niveles de señal tan bajos, son más propensos a aparecer y, en consecuencia, se necesitan circuitos muy bien elaborados.

3 - BRAZOS:
Es fundamental que el brazo reúna una serie de condiciones indispensables, tales como:
· Mínimo rozamiento en ambos ejes de movimiento
· Error de lectura mínimo
· Empuje lateral nulo.
Aparte de ello, hay otra serie de factores muy importantes:
· Equilibrio vertical y horizontal
· Forma adecuada del brazo
· Máxima rigidez
· Frecuencia de resonancia nula
3.1 - METODOS PARA MINIMIZAR EL ROZAMIENTO:
Hay varios sistemas para que el rozamiento de las articulaciones del brazo se reduzca a la mínima expresión:
· Apoyo directo de los ejes
' Cojinetes, sean de bolas o de agujas
· Punzones
· Cuchillas
La primera se utiliza en los equipos más económicos, ya que es la que presenta un nivel de rozamiento más elevado. El resto de opciones son profusamente utilizadas por muchos fabricantes con ligeras variaciones.
3.2 - ERROR DE LECTURA:
La grabación de un disco se realiza de manera tangencial a la espira del surco, describiendo un radio perfectamente recto. En cambio, el brazo de un giradiscos normal se desplaza describiendo un arco, por lo que la lectura no se realiza exactamente igual que se hizo en la grabación.
Ésto trae como consecuencia que la perpendicularidad entre la tangente al surco y la de la trayectoria de la aguja presente ángulos de error en prácticamente todo su recorrido, excepto en un solo punto. Este ángulo de error será tanto menor cuanto mayor sea la longitud del brazo.
El error de lectura puede minimizarse combinando varios métodos:
· Colocando el punto de articulación del brazo adecuadamente
· Aumentando la longitud del brazo
· Dándole un ángulo de acodado al brazo.
Como el error es imposible de eliminar del todo, incluso combinando todos éstos métodos, los fabricantes han llegado a una solución de compromiso en la cual la mejor combinación de soluciones es la que produzca menor error cuando el radio de los surcos sea menor (pistas interiores), que es donde el problema se hace más crítico.
3.3 - SKATING (deslizamiento o patinado):
Como casi siempre suele ocurrir en ingeniería, la solución a un problema genera otro problema.
Al hacer un codo en el brazo para reducir el error de lectura se plantea otro problema: el "skating", o empuje lateral, que viene dado porque, al girar el disco, se produce una fuerza de rozamiento que es directamente proporcional a la fuerza de apoyo de la aguja. Ésto genera una fuerza centrípeta que tiende al brazo a desplazarse hacia el interior del surco.
Si el brazo fuese recto, la fuerza centrífuga que lo obliga a “tirar” hacia fuera compensaría éste efecto pero, al estar acodado hacia adentro, “gana” la fuerza centrípeta. La solución está en generar una fuerza hacia el exterior, que potencie a la fuerza centrífuga: Esto se hace mediante el mecanismo llamado “antiskating” (anti-deslizamiento).
Como la fuerza del "skating" es proporcional a la fuerza de apoyo de la aguja, el mecanismo "antiskating" debe ejercer una fuerza en sentido contrario que sea del mismo valor. Es por ello por lo que los controles antiskating vienen marcados con la misma escala en gramos que el contrapeso, por lo que deberán ser ajustados al mismo valor.
3.4 - FORMAS DEL BRAZO:
Partiendo de la base de que una de las soluciones al error de lectura es hacer un codo en el brazo, cada fabricante tiene su propia “receta” para ello. De éste modo existen tres maneras de conseguir el ángulo adecuado:
3.4.1 - BRAZO RECTO:
En éste tipo, el portacápsulas es el que forma el ángulo correspondiente.
3.4.2 - BRAZO ACODADO (o en “J”):
El propio brazo está doblado en el ángulo correcto y a una distancia aproximada de las tres cuartas partes de su longitud, partiendo desde la base de apoyo.
3.4.3 - BRAZO EN “S”:
Es una variación del brazo acodado. Parece que ésta solución corrige el error de lectura sin necesidad de combinarla con una excesiva longitud del brazo, es decir, que permite construir el brazo con menor longitud, lo cual repercute favorablemente en el peso de éste.
3.4.4 - BRAZO TANGENCIAL:
El sistema tangencial pretendió ser la panacea para evitar el "tracking error" (error de pista), que se produce en determinados puntos del disco, debido a que la trayectoria del brazo (en forma de arco) provoca que la aguja no ataque siempre perpendicularmente al surco en algunas partes de su recorrido como se ha mencionado con anterioridad.
Se basa en un servomotor que detecta la posición del surco respecto a la aguja moviendo lateralmente el brazo. Es un sistema complicado y, en caso de fallo del servo, puede provocar tanto la deformación del cantilever de la aguja como deterioros graves en el disco. Además, los giradiscos con este sistema tienen (tenían) precios muy elevados.
Es fundamental que el brazo reúna una serie de condiciones indispensables, tales como:
· Mínimo rozamiento en ambos ejes de movimiento
· Error de lectura mínimo
· Empuje lateral nulo.
Aparte de ello, hay otra serie de factores muy importantes:
· Equilibrio vertical y horizontal
· Forma adecuada del brazo
· Máxima rigidez
· Frecuencia de resonancia nula
3.1 - METODOS PARA MINIMIZAR EL ROZAMIENTO:
Hay varios sistemas para que el rozamiento de las articulaciones del brazo se reduzca a la mínima expresión:
· Apoyo directo de los ejes
' Cojinetes, sean de bolas o de agujas
· Punzones
· Cuchillas
La primera se utiliza en los equipos más económicos, ya que es la que presenta un nivel de rozamiento más elevado. El resto de opciones son profusamente utilizadas por muchos fabricantes con ligeras variaciones.
3.2 - ERROR DE LECTURA:
La grabación de un disco se realiza de manera tangencial a la espira del surco, describiendo un radio perfectamente recto. En cambio, el brazo de un giradiscos normal se desplaza describiendo un arco, por lo que la lectura no se realiza exactamente igual que se hizo en la grabación.
Ésto trae como consecuencia que la perpendicularidad entre la tangente al surco y la de la trayectoria de la aguja presente ángulos de error en prácticamente todo su recorrido, excepto en un solo punto. Este ángulo de error será tanto menor cuanto mayor sea la longitud del brazo.
El error de lectura puede minimizarse combinando varios métodos:
· Colocando el punto de articulación del brazo adecuadamente
· Aumentando la longitud del brazo
· Dándole un ángulo de acodado al brazo.
Como el error es imposible de eliminar del todo, incluso combinando todos éstos métodos, los fabricantes han llegado a una solución de compromiso en la cual la mejor combinación de soluciones es la que produzca menor error cuando el radio de los surcos sea menor (pistas interiores), que es donde el problema se hace más crítico.
3.3 - SKATING (deslizamiento o patinado):
Como casi siempre suele ocurrir en ingeniería, la solución a un problema genera otro problema.
Al hacer un codo en el brazo para reducir el error de lectura se plantea otro problema: el "skating", o empuje lateral, que viene dado porque, al girar el disco, se produce una fuerza de rozamiento que es directamente proporcional a la fuerza de apoyo de la aguja. Ésto genera una fuerza centrípeta que tiende al brazo a desplazarse hacia el interior del surco.
Si el brazo fuese recto, la fuerza centrífuga que lo obliga a “tirar” hacia fuera compensaría éste efecto pero, al estar acodado hacia adentro, “gana” la fuerza centrípeta. La solución está en generar una fuerza hacia el exterior, que potencie a la fuerza centrífuga: Esto se hace mediante el mecanismo llamado “antiskating” (anti-deslizamiento).
Como la fuerza del "skating" es proporcional a la fuerza de apoyo de la aguja, el mecanismo "antiskating" debe ejercer una fuerza en sentido contrario que sea del mismo valor. Es por ello por lo que los controles antiskating vienen marcados con la misma escala en gramos que el contrapeso, por lo que deberán ser ajustados al mismo valor.
3.4 - FORMAS DEL BRAZO:
Partiendo de la base de que una de las soluciones al error de lectura es hacer un codo en el brazo, cada fabricante tiene su propia “receta” para ello. De éste modo existen tres maneras de conseguir el ángulo adecuado:
3.4.1 - BRAZO RECTO:
En éste tipo, el portacápsulas es el que forma el ángulo correspondiente.
3.4.2 - BRAZO ACODADO (o en “J”):
El propio brazo está doblado en el ángulo correcto y a una distancia aproximada de las tres cuartas partes de su longitud, partiendo desde la base de apoyo.
3.4.3 - BRAZO EN “S”:
Es una variación del brazo acodado. Parece que ésta solución corrige el error de lectura sin necesidad de combinarla con una excesiva longitud del brazo, es decir, que permite construir el brazo con menor longitud, lo cual repercute favorablemente en el peso de éste.
3.4.4 - BRAZO TANGENCIAL:
El sistema tangencial pretendió ser la panacea para evitar el "tracking error" (error de pista), que se produce en determinados puntos del disco, debido a que la trayectoria del brazo (en forma de arco) provoca que la aguja no ataque siempre perpendicularmente al surco en algunas partes de su recorrido como se ha mencionado con anterioridad.
Se basa en un servomotor que detecta la posición del surco respecto a la aguja moviendo lateralmente el brazo. Es un sistema complicado y, en caso de fallo del servo, puede provocar tanto la deformación del cantilever de la aguja como deterioros graves en el disco. Además, los giradiscos con este sistema tienen (tenían) precios muy elevados.
4 - PROTRACTORS
A fin de minimizar, en lo posible, los errores de lectura de la aguja debido al ángulo variable que se forma durante la reproducción, se utilizan los "Protractors".
Os podéis descargar un pequeño programa gratuito para generarlos clicando sobre la imagen de la izquierda.
4.1 - PROCEDIMIENTO PARA EL AJUSTE CORRECTO DE LA CÁPSULA
- Colocar la plantilla generada por el programa en el plato.
- Ajustar el peso adecuado para la cápsula.
- Dejar el antiskating en "0" (cero)
- Ajuste de la longitud efectiva (distancia entre el pivote del brazo y la punta de la aguja), y ajustar la cápsula para que siga el arco trazado en el protractor.
- Ajuste del ángulo offset. Ahora es preciso alinear la cápsula con las retículas que aparecen en la plantilla para ajustar el ángulo de offset, girrando la cápsula en el portacápsulas.
- Revisar el ajuste de longitud efectiva (es muy fácil que al girar la cápsula lo hayamos alterado) y el ángulo sucesivas veces hasta lograr que ambos parámetros estén perfectos.
- Echarle bastante paciencia hasta conseguir que los dos ajustes (longitud efectiva y ángulo) queden perfectamente alineados.
A fin de minimizar, en lo posible, los errores de lectura de la aguja debido al ángulo variable que se forma durante la reproducción, se utilizan los "Protractors".
Os podéis descargar un pequeño programa gratuito para generarlos clicando sobre la imagen de la izquierda.
4.1 - PROCEDIMIENTO PARA EL AJUSTE CORRECTO DE LA CÁPSULA
- Colocar la plantilla generada por el programa en el plato.
- Ajustar el peso adecuado para la cápsula.
- Dejar el antiskating en "0" (cero)
- Ajuste de la longitud efectiva (distancia entre el pivote del brazo y la punta de la aguja), y ajustar la cápsula para que siga el arco trazado en el protractor.
- Ajuste del ángulo offset. Ahora es preciso alinear la cápsula con las retículas que aparecen en la plantilla para ajustar el ángulo de offset, girrando la cápsula en el portacápsulas.
- Revisar el ajuste de longitud efectiva (es muy fácil que al girar la cápsula lo hayamos alterado) y el ángulo sucesivas veces hasta lograr que ambos parámetros estén perfectos.
- Echarle bastante paciencia hasta conseguir que los dos ajustes (longitud efectiva y ángulo) queden perfectamente alineados.

5- MOTORES
5.1 - MOTORES DE TRACCIÓN
Se emplean para conseguir el movimiento de giro del plato.
Pueden ser de diferentes tipos y características, todo ello le confiere su personalidad a la pletina giradiscos.
Entre las características mas sobresalientes destacan la uniformidad en la velocidad, su sistema de alimentación y la vibración producida por el mismo.
Los más usuales son los siguientes:
5. 1. 1 - MOTOR ASÍNCRONO
Es el motor que se alimenta directamente de la red de tensión alterna, por lo que su funcionamiento depende de la tensión de ésta y de la frecuencia de la misma, así que la estabilidad en su funcionamiento no es muy buena.
La velocidad nominal depende del numero de polos que esta constituido. siendo normalmente de 2 ( 3.000 r.p.m.) o 4 ( 1.500 r.p.m. )
Su tamaño es bastante voluminoso debido en parte al conjunto de chapas metálicas que forman el conjunto magnético. Su precio es elevado con respecto a otros tipos de motor.
5.1.2 - MOTOR SÍNCRONO DE ALTA VELOCIDAD
Es una variante del anterior, por lo que es un motor asíncrono sincronizado, Se le añade un imán con el fin de conseguir que alcance la velocidad sincrona.
La velocidad más usual encontrada en este tipo de motor se sitúa en 3.000 r.p.m. para el motor de 2 polos y de 1.500 r.p.m. para el motor de 4 polos, lo que le confiere una exactitud en velocidad, siendo independiente de la tensión de red y dependiendo sólo de la frecuencia de la misma que, como se sabe, en Europa es de 50 Hz (60 Hz en U.S.A.) y posee una gran exactitud
5.1.3 - MOTOR SÍNCRONO DE BAJA VELOCIDAD
Su constitución es totalmente diferente de los anteriores. Con el aumento del numero de polos se reduce proporcionalmente la velocidad del motor.
Velocidad (rpm) = 1.500 / nº de pares de polos
Son de pequeño tamaño y económicos de precio ya que los polos se consiguen por medio del troquelado y doblado de una sola plancha. Su vibración es muy fuerte debido a la velocidad que alcanza, por lo que su sistema de suspensión es muy elaborado para evitar en lo posible este problema.
Se utiliza en sistemas de tracción por correa debido a que tiene un par de arranque muy bajo.
5.1.4 - MOTOR DE CORRIENTE CONTINUA
Son alimentados con una fuente de tensión continua, bien procedente de un conjunto de pilas o baterías en el caso de aparatos portátiles, o bien, directamente de la tensión de red posteriormente reducida a la tensión adecuada, rectificada y filtrada (normalmente suelen situarse entre 6 y 8 voltios de c.c.
No deben conectarse directamente a la tensión continua de alimentación debido a la gran influencia que posee ésta sobre la velocidad del motor, por lo que normalmente se dispone de un circuito exterior de regulación de velocidad que puede ser de regulación centrifuga o mecánica y de regulación electrónica.
La regulación mecánica es usada en aparatos portátiles, no presentando la estabilidad requerida en equipos de H1-Fl.
La regulación electrónica se basa en la regulación de corriente absorbida por el motor, es decir en su consumo.
En algunos equipos, este circuito de regulación se consigue mediante la comparación de fase de dos frecuencias iguales, una que se obtiene del generador tacométrico situado en el eje del motor y otra que proviene del circuito regulador de velocidad.
Si la frecuencia es controlada por un oscilador de cuarzo, se obtiene una gran estabilidad en la velocidad.
5.1.5 - MOTOR DE TRACCIÓN DIRECTA
Denominado también central, es aquél que la tracción del plato la realiza sin ningún elemento intermedio, o sea. que el eje del motor hace girar directamente el plato sobre el que se apoya el disco de vinilo. Al no existir ningún elemento intermedio, la velocidad del plato es la misma que la del motor, lo cual no ocurre con los de polea intermedia o los de trasmisión por correa, en los cuales se introduce una pequeña variación por deslizamiento de cualquiera de dichos elementos,
Los principales elementos de este tipo de motor son:
- Un rotor formado por un disco de imán con los polos
- Un estator formado por una chapa en la que van adosadas las bobinas sin núcleo.
- Un detector encargado de identificar los polos del imán.
- Un generador de c.a. que proporciona una información para el control de velocidad.
- Un circuito que conmuta los polos para conseguir la rotación del motor y el regulador de velocidad, que en este tipo de motor normalmente es un controlador de fase.
5.1 - MOTORES DE TRACCIÓN
Se emplean para conseguir el movimiento de giro del plato.
Pueden ser de diferentes tipos y características, todo ello le confiere su personalidad a la pletina giradiscos.
Entre las características mas sobresalientes destacan la uniformidad en la velocidad, su sistema de alimentación y la vibración producida por el mismo.
Los más usuales son los siguientes:
5. 1. 1 - MOTOR ASÍNCRONO
Es el motor que se alimenta directamente de la red de tensión alterna, por lo que su funcionamiento depende de la tensión de ésta y de la frecuencia de la misma, así que la estabilidad en su funcionamiento no es muy buena.
La velocidad nominal depende del numero de polos que esta constituido. siendo normalmente de 2 ( 3.000 r.p.m.) o 4 ( 1.500 r.p.m. )
Su tamaño es bastante voluminoso debido en parte al conjunto de chapas metálicas que forman el conjunto magnético. Su precio es elevado con respecto a otros tipos de motor.
5.1.2 - MOTOR SÍNCRONO DE ALTA VELOCIDAD
Es una variante del anterior, por lo que es un motor asíncrono sincronizado, Se le añade un imán con el fin de conseguir que alcance la velocidad sincrona.
La velocidad más usual encontrada en este tipo de motor se sitúa en 3.000 r.p.m. para el motor de 2 polos y de 1.500 r.p.m. para el motor de 4 polos, lo que le confiere una exactitud en velocidad, siendo independiente de la tensión de red y dependiendo sólo de la frecuencia de la misma que, como se sabe, en Europa es de 50 Hz (60 Hz en U.S.A.) y posee una gran exactitud
5.1.3 - MOTOR SÍNCRONO DE BAJA VELOCIDAD
Su constitución es totalmente diferente de los anteriores. Con el aumento del numero de polos se reduce proporcionalmente la velocidad del motor.
Velocidad (rpm) = 1.500 / nº de pares de polos
Son de pequeño tamaño y económicos de precio ya que los polos se consiguen por medio del troquelado y doblado de una sola plancha. Su vibración es muy fuerte debido a la velocidad que alcanza, por lo que su sistema de suspensión es muy elaborado para evitar en lo posible este problema.
Se utiliza en sistemas de tracción por correa debido a que tiene un par de arranque muy bajo.
5.1.4 - MOTOR DE CORRIENTE CONTINUA
Son alimentados con una fuente de tensión continua, bien procedente de un conjunto de pilas o baterías en el caso de aparatos portátiles, o bien, directamente de la tensión de red posteriormente reducida a la tensión adecuada, rectificada y filtrada (normalmente suelen situarse entre 6 y 8 voltios de c.c.
No deben conectarse directamente a la tensión continua de alimentación debido a la gran influencia que posee ésta sobre la velocidad del motor, por lo que normalmente se dispone de un circuito exterior de regulación de velocidad que puede ser de regulación centrifuga o mecánica y de regulación electrónica.
La regulación mecánica es usada en aparatos portátiles, no presentando la estabilidad requerida en equipos de H1-Fl.
La regulación electrónica se basa en la regulación de corriente absorbida por el motor, es decir en su consumo.
En algunos equipos, este circuito de regulación se consigue mediante la comparación de fase de dos frecuencias iguales, una que se obtiene del generador tacométrico situado en el eje del motor y otra que proviene del circuito regulador de velocidad.
Si la frecuencia es controlada por un oscilador de cuarzo, se obtiene una gran estabilidad en la velocidad.
5.1.5 - MOTOR DE TRACCIÓN DIRECTA
Denominado también central, es aquél que la tracción del plato la realiza sin ningún elemento intermedio, o sea. que el eje del motor hace girar directamente el plato sobre el que se apoya el disco de vinilo. Al no existir ningún elemento intermedio, la velocidad del plato es la misma que la del motor, lo cual no ocurre con los de polea intermedia o los de trasmisión por correa, en los cuales se introduce una pequeña variación por deslizamiento de cualquiera de dichos elementos,
Los principales elementos de este tipo de motor son:
- Un rotor formado por un disco de imán con los polos
- Un estator formado por una chapa en la que van adosadas las bobinas sin núcleo.
- Un detector encargado de identificar los polos del imán.
- Un generador de c.a. que proporciona una información para el control de velocidad.
- Un circuito que conmuta los polos para conseguir la rotación del motor y el regulador de velocidad, que en este tipo de motor normalmente es un controlador de fase.
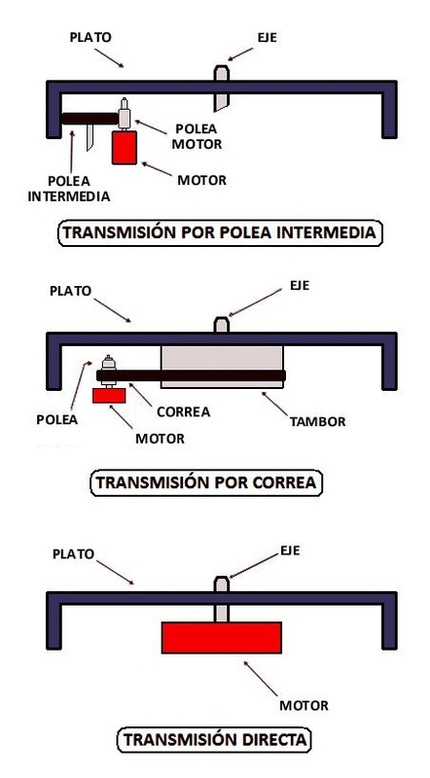
6 - SISTEMAS DE TRACCIÓN (TRANSMISIÓN):
6.1 - POR POLEA INTERMEDIA
El movimiento entre el eje del motor y el plato se realiza mediante una polea intermedia, también denomina polea local o de arrastre, cuya composición es de caucho en su parte externa y metálica en su centro, ya que va situada sobre un eje metálico.
Su exterior contacta simultáneamente con la polea del eje del motor y el borde interior del faldón del plato.
El cambio de velocidad se consigue mediante la variación del diámetro de la polea del eje del motor.
Un inconveniente de este tipo de tracción es que las vibraciones del motor no quedan suficientemente amortiguadas. Cuando se produce un reposo. la polea no contacta con ningún elemento.
6.2 - POR CORREA
El movimiento entre el eje del motor y el plato se realiza por medio de una correa de goma o caucho, que abraza por un lado a una polea situada en el eje del motor y, por el otro, a un tambor colocado debajo del plato y concéntrico al mismo
Este tambor suele ser solidario al plato por lo que forman una sola pieza aunque, a veces, también se utiliza un subplato sobre el que se monta el plato principal.
El cambio de velocidad se realiza desplazando la correa sobre
distintos diámetros de la polea del eje del motor mediante una horquilla movida por un selector externo.
Este sistema proporciona una buena amortiguación para las vibraciones del motor, por lo que es ampliamente utilizado.
6.3 - TRACCIÓN DIRECTA (DIRECT DRIVE)
En estos tipos de tocadiscos el eje del motor coincide con el del plato, por lo que el motor debe girar a la misma velocidad que requiere el disco que se desea reproducir.
Aunque parezca que es el sistema más simple requiere de motores muy complejos, de gran precisión y con un buen par de arranque. Lo malo es que las vibraciones se transmiten directamente al plato (ver apartado 5.1.5)
6.1 - POR POLEA INTERMEDIA
El movimiento entre el eje del motor y el plato se realiza mediante una polea intermedia, también denomina polea local o de arrastre, cuya composición es de caucho en su parte externa y metálica en su centro, ya que va situada sobre un eje metálico.
Su exterior contacta simultáneamente con la polea del eje del motor y el borde interior del faldón del plato.
El cambio de velocidad se consigue mediante la variación del diámetro de la polea del eje del motor.
Un inconveniente de este tipo de tracción es que las vibraciones del motor no quedan suficientemente amortiguadas. Cuando se produce un reposo. la polea no contacta con ningún elemento.
6.2 - POR CORREA
El movimiento entre el eje del motor y el plato se realiza por medio de una correa de goma o caucho, que abraza por un lado a una polea situada en el eje del motor y, por el otro, a un tambor colocado debajo del plato y concéntrico al mismo
Este tambor suele ser solidario al plato por lo que forman una sola pieza aunque, a veces, también se utiliza un subplato sobre el que se monta el plato principal.
El cambio de velocidad se realiza desplazando la correa sobre
distintos diámetros de la polea del eje del motor mediante una horquilla movida por un selector externo.
Este sistema proporciona una buena amortiguación para las vibraciones del motor, por lo que es ampliamente utilizado.
6.3 - TRACCIÓN DIRECTA (DIRECT DRIVE)
En estos tipos de tocadiscos el eje del motor coincide con el del plato, por lo que el motor debe girar a la misma velocidad que requiere el disco que se desea reproducir.
Aunque parezca que es el sistema más simple requiere de motores muy complejos, de gran precisión y con un buen par de arranque. Lo malo es que las vibraciones se transmiten directamente al plato (ver apartado 5.1.5)

6.4 - POLEAS DE MOTOR
Obsérvense los diferentes diámetros de la espiga que va sujeta al eje motor y que son las encargadas del cambio de velocidades.
- En los sistemas de tracción por polea intermedia, ésta se apoya en uno u otro diámetro de la espiga a fin de proporcionar la velocidad deseada.
- En los de tracción por correa, ésta se hace deslizar sobre el diámetro adecuado de la polea.
Resumiendo: Cuanto menor sea el diámetro de la polea, menor será la velocidad de rotación del plato.
Obsérvense los diferentes diámetros de la espiga que va sujeta al eje motor y que son las encargadas del cambio de velocidades.
- En los sistemas de tracción por polea intermedia, ésta se apoya en uno u otro diámetro de la espiga a fin de proporcionar la velocidad deseada.
- En los de tracción por correa, ésta se hace deslizar sobre el diámetro adecuado de la polea.
Resumiendo: Cuanto menor sea el diámetro de la polea, menor será la velocidad de rotación del plato.
6.5 - EJEMPLOS DE LOS TRES TIPOS DE TRACCIÓN:
Las diferencias de complejidad entre los tres tipos es obvia. Una imagen vale más que mil palabras.
Las diferencias de complejidad entre los tres tipos es obvia. Una imagen vale más que mil palabras.

7 - PLATOS:
7.1 - GENERALIDADES
Por regla general están construidos de metal y, normalmente, se utilizan materiales antimagnéticos, tal como el aluminio.
Los de baja calidad suelen ser de plástico y de escasa masa y peso.
7.1 - GENERALIDADES
Por regla general están construidos de metal y, normalmente, se utilizan materiales antimagnéticos, tal como el aluminio.
Los de baja calidad suelen ser de plástico y de escasa masa y peso.
El plato gira en torno a un eje central sobre el que va apoyado y lo hace a la velocidad que previamente se ha seleccionado.
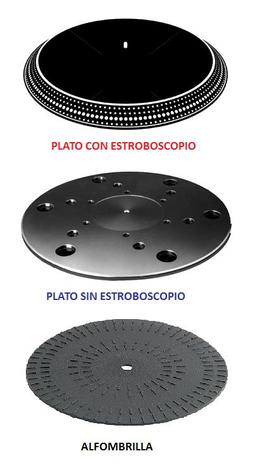
Pueden disponer (o no) de marcas estroboscópicas con las cuales es posible controlar la correcta velocidad del plato. Estas marcas se iluminan mediante una lamparita de neón que parpadea a la frecuencia de red. A la velocidad seleccionada, las marcas aparecerán estáticas, de lo contrario la velocidad de giro es mayor o menor según tengan tendencia a moverse hacia la derecha o hacia la izquierda.
Si el plato dispone de control fino de velocidad ("pitch control"), éste deberá regularse en consecuencia hasta que las marcas permanezcan visualmente paradas.
Una cuestión importante a tener en cuenta a la hora de su construcción no es su peso, sino la distribución de éste en el plato a fin de evitar, en lo posible, el "efecto de volante" que se puede provocar al girar, de forma que se oponga a las variaciones de velocidad en su giro.
En la parte superior del plato va colocada una alfombrilla elástica (generalmente de goma o caucho) sobre la que se coloca el disco de vinilo a fin de no deteriorarlo.
Pueden disponer (o no) de marcas estroboscópicas con las cuales es posible controlar la correcta velocidad del plato. Estas marcas se iluminan mediante una lamparita de neón que parpadea a la frecuencia de red. A la velocidad seleccionada, las marcas aparecerán estáticas, de lo contrario la velocidad de giro es mayor o menor según tengan tendencia a moverse hacia la derecha o hacia la izquierda.
Si el plato dispone de control fino de velocidad ("pitch control"), éste deberá regularse en consecuencia hasta que las marcas permanezcan visualmente paradas.
Una cuestión importante a tener en cuenta a la hora de su construcción no es su peso, sino la distribución de éste en el plato a fin de evitar, en lo posible, el "efecto de volante" que se puede provocar al girar, de forma que se oponga a las variaciones de velocidad en su giro.
En la parte superior del plato va colocada una alfombrilla elástica (generalmente de goma o caucho) sobre la que se coloca el disco de vinilo a fin de no deteriorarlo.
7.2 - CONTROL DE VELOCIDAD
Como hemos comentado antes, la velocidad se puede comprobar con un sistema denominado estroboscopio, mediante el cual una lámpara emite una luz que incide sobre unas perforaciones o rayas que se encuentran en el extremo exterior del plato, produciendo un efecto óptico, de tal forma que si el destello aparece fijo significa que la velocidad es la correcta.
Otro sistema es el de utilizar un disco (generalmente de cartón y que se sitúa sobre el plato) en el que se han impreso una serie de divisiones las cuales, al girar el plato, hace que al mirarlas permanezcan inmóviles, significando que la velocidad también es la idónea.
Cuando la velocidad sufre variaciones constantes, es decir, que se produce una fluctuación rápida de la velocidad haciendo que ésta no sea uniforme, se produce en el sonido una sensación de lloro. En la mayoría de casos ésto es debido a problemas en el sistema de transmisión (correas desgastadas, engrasadas, deformadas...). Otra causa puede ser debida a defectos en la polea del motor.
Todos los elementos del tocadiscos son delicados por lo que se tendrá especial cuidado en no someterlos a tratos inadecuados (golpes, caídas...), ya que todo ello influirá siempre en su funcionamiento
Como hemos comentado antes, la velocidad se puede comprobar con un sistema denominado estroboscopio, mediante el cual una lámpara emite una luz que incide sobre unas perforaciones o rayas que se encuentran en el extremo exterior del plato, produciendo un efecto óptico, de tal forma que si el destello aparece fijo significa que la velocidad es la correcta.
Otro sistema es el de utilizar un disco (generalmente de cartón y que se sitúa sobre el plato) en el que se han impreso una serie de divisiones las cuales, al girar el plato, hace que al mirarlas permanezcan inmóviles, significando que la velocidad también es la idónea.
Cuando la velocidad sufre variaciones constantes, es decir, que se produce una fluctuación rápida de la velocidad haciendo que ésta no sea uniforme, se produce en el sonido una sensación de lloro. En la mayoría de casos ésto es debido a problemas en el sistema de transmisión (correas desgastadas, engrasadas, deformadas...). Otra causa puede ser debida a defectos en la polea del motor.
Todos los elementos del tocadiscos son delicados por lo que se tendrá especial cuidado en no someterlos a tratos inadecuados (golpes, caídas...), ya que todo ello influirá siempre en su funcionamiento

8 - FONOCHASIS:
8.1 - GENERALIDADES
Los fonochasis se clasifican, básicamente, según los siguientes tipos:
· Manual con paro
· Manual sin paro
· Semiautomáticos
· Automáticos
· Cambiadiscos
8.1 - GENERALIDADES
Los fonochasis se clasifican, básicamente, según los siguientes tipos:
· Manual con paro
· Manual sin paro
· Semiautomáticos
· Automáticos
· Cambiadiscos
8.1.1 - MANUAL CON PARO
Su funcionamiento y, colocación del brazo sobre el disco se realiza manualmente, el paro al final del disco lo hace automáticamente al concluir el disco, la pronunciada espiral de avance hacia el centro del propio disco, hace que el brazo se desplace muy rápidamente y utilizando la energía cinética acumulada en el giro del plato, un detector del movimiento del brazo, produce el desplazamiento de una palanca y mediante un sistema mecánico efectúa el disparo.
Su funcionamiento y, colocación del brazo sobre el disco se realiza manualmente, el paro al final del disco lo hace automáticamente al concluir el disco, la pronunciada espiral de avance hacia el centro del propio disco, hace que el brazo se desplace muy rápidamente y utilizando la energía cinética acumulada en el giro del plato, un detector del movimiento del brazo, produce el desplazamiento de una palanca y mediante un sistema mecánico efectúa el disparo.
8.1.2 - MANUAL SIN PARO
El sistema de paro descrito anteriormente, funcionó durante años, con la aparición de la Hi-Fl, esto resultó ser un problema debido al peso propio que presentaba el brazo y la cápsula con todo su sistema, por lo que se decidió suplir este tipo de paro, realizando manualmente el misino. Con el desarrollo de nuevas tecnologías el peso de estos elementos disminuyó considerablemente, con lo que se volvió a retomar el sistema de paro, quedando relegada la manualidad de la maniobra para giradiscos que se emplean en determinadas funciones, como en discotecas, etc,
El sistema de paro descrito anteriormente, funcionó durante años, con la aparición de la Hi-Fl, esto resultó ser un problema debido al peso propio que presentaba el brazo y la cápsula con todo su sistema, por lo que se decidió suplir este tipo de paro, realizando manualmente el misino. Con el desarrollo de nuevas tecnologías el peso de estos elementos disminuyó considerablemente, con lo que se volvió a retomar el sistema de paro, quedando relegada la manualidad de la maniobra para giradiscos que se emplean en determinadas funciones, como en discotecas, etc,
8.1.3 - SEMIAUTOMÁTICO
La puesta en marcha del giradiscos y la colocación del brazo sobre el disco es manual también, pero posee un sistema de paro automático, mediante el cual el brazo se levanta del disco, de manera que se pueda retirar del disco sin posibilidad de que se pueda rayar. Existe una variedad que consiste en el desplazamiento del brazo una vez acabado el disco, hacia el lugar de reposo del propio brazo, por lo que se denomina esta acción de retorno automático.
La puesta en marcha del giradiscos y la colocación del brazo sobre el disco es manual también, pero posee un sistema de paro automático, mediante el cual el brazo se levanta del disco, de manera que se pueda retirar del disco sin posibilidad de que se pueda rayar. Existe una variedad que consiste en el desplazamiento del brazo una vez acabado el disco, hacia el lugar de reposo del propio brazo, por lo que se denomina esta acción de retorno automático.
8.1.4 - AUTOMÁTICO
En él la colocación del brazo sobre el disco, como el paro y retirada del mismo, se efectúan de forma automática. Normalmente se deberá introducir el dato del diámetro del disco, en algunos modelos esta información queda reflejada de forma automática al seleccionar la velocidad de funcionamiento, siendo de 17 cm para discos de 45 r.p.m. y de 30 cm para discos de 33.3 r.p.m. conocidos también como L.P.
En él la colocación del brazo sobre el disco, como el paro y retirada del mismo, se efectúan de forma automática. Normalmente se deberá introducir el dato del diámetro del disco, en algunos modelos esta información queda reflejada de forma automática al seleccionar la velocidad de funcionamiento, siendo de 17 cm para discos de 45 r.p.m. y de 30 cm para discos de 33.3 r.p.m. conocidos también como L.P.

8.1.5 - CAMBIADISCOS
Este tipo de giradiscos permite la colocación de varios discos del mismo diámetro y superpuestos en un plano horizontal. Están colocados sobre una torreta situada en el eje del plato y a un cierta altura de éste. Al poner en marcha el giradiscos, se esconden unos soportes que sujetan los discos, haciéndolo de tal manera y con la rapidez suficiente para que solo caiga tal disco sobre el plato, inmediatamente se pondrá en marcha el sistema automático que hará que el brazo se desplace hacia el disco comenzando así la sonorización del mismo, llegada su finalización, se levantará el brazo y se retirará hacia el punto de reposo sin llegar a hacerlo, al mismo tiempo los soportes que sujetan los discos de la parte superior vuelven a esconderse permitiendo que caiga un nuevo disco y comience de nuevo el proceso. Cuando se hayan agotado todos los discos almacenados en la parte superior (no es recomendable colocar mas de seis discos) y finalizado el último de ellos el tocadiscos realizará la maniobra de paro automático.
La presión de la aguja en cada disco va aumentando, ya que la altura del plano será diferente en cada uno de ellos, esto hace que sólo el primero de ellos reciba la presión ideal mientras que los otros no. Esto, unido a la serie de problemas derivados por el desgaste en el eje de los discos y a la complejidad de los mecanismos, provocaron que no tuvieran un excesivo éxito en los equipos de HI-FI.
Este tipo de giradiscos permite la colocación de varios discos del mismo diámetro y superpuestos en un plano horizontal. Están colocados sobre una torreta situada en el eje del plato y a un cierta altura de éste. Al poner en marcha el giradiscos, se esconden unos soportes que sujetan los discos, haciéndolo de tal manera y con la rapidez suficiente para que solo caiga tal disco sobre el plato, inmediatamente se pondrá en marcha el sistema automático que hará que el brazo se desplace hacia el disco comenzando así la sonorización del mismo, llegada su finalización, se levantará el brazo y se retirará hacia el punto de reposo sin llegar a hacerlo, al mismo tiempo los soportes que sujetan los discos de la parte superior vuelven a esconderse permitiendo que caiga un nuevo disco y comience de nuevo el proceso. Cuando se hayan agotado todos los discos almacenados en la parte superior (no es recomendable colocar mas de seis discos) y finalizado el último de ellos el tocadiscos realizará la maniobra de paro automático.
La presión de la aguja en cada disco va aumentando, ya que la altura del plano será diferente en cada uno de ellos, esto hace que sólo el primero de ellos reciba la presión ideal mientras que los otros no. Esto, unido a la serie de problemas derivados por el desgaste en el eje de los discos y a la complejidad de los mecanismos, provocaron que no tuvieran un excesivo éxito en los equipos de HI-FI.
